Flight Computer
Description
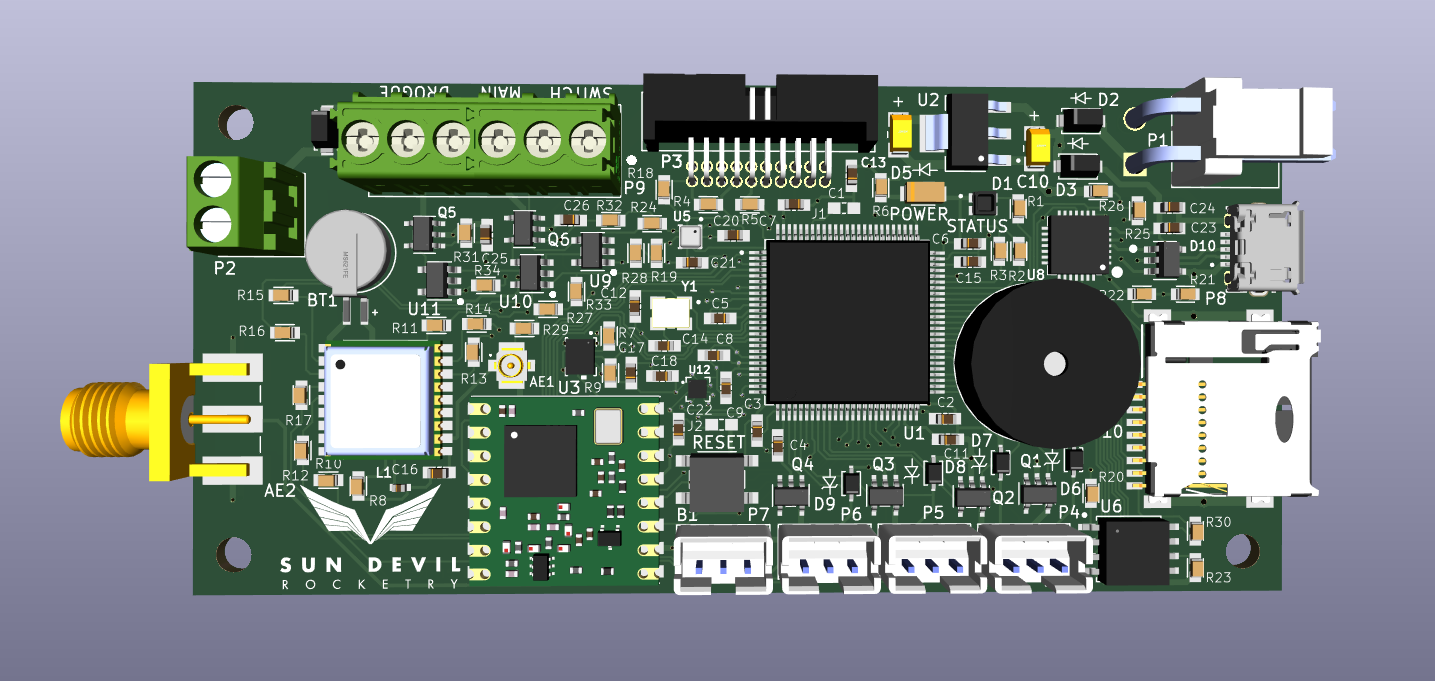
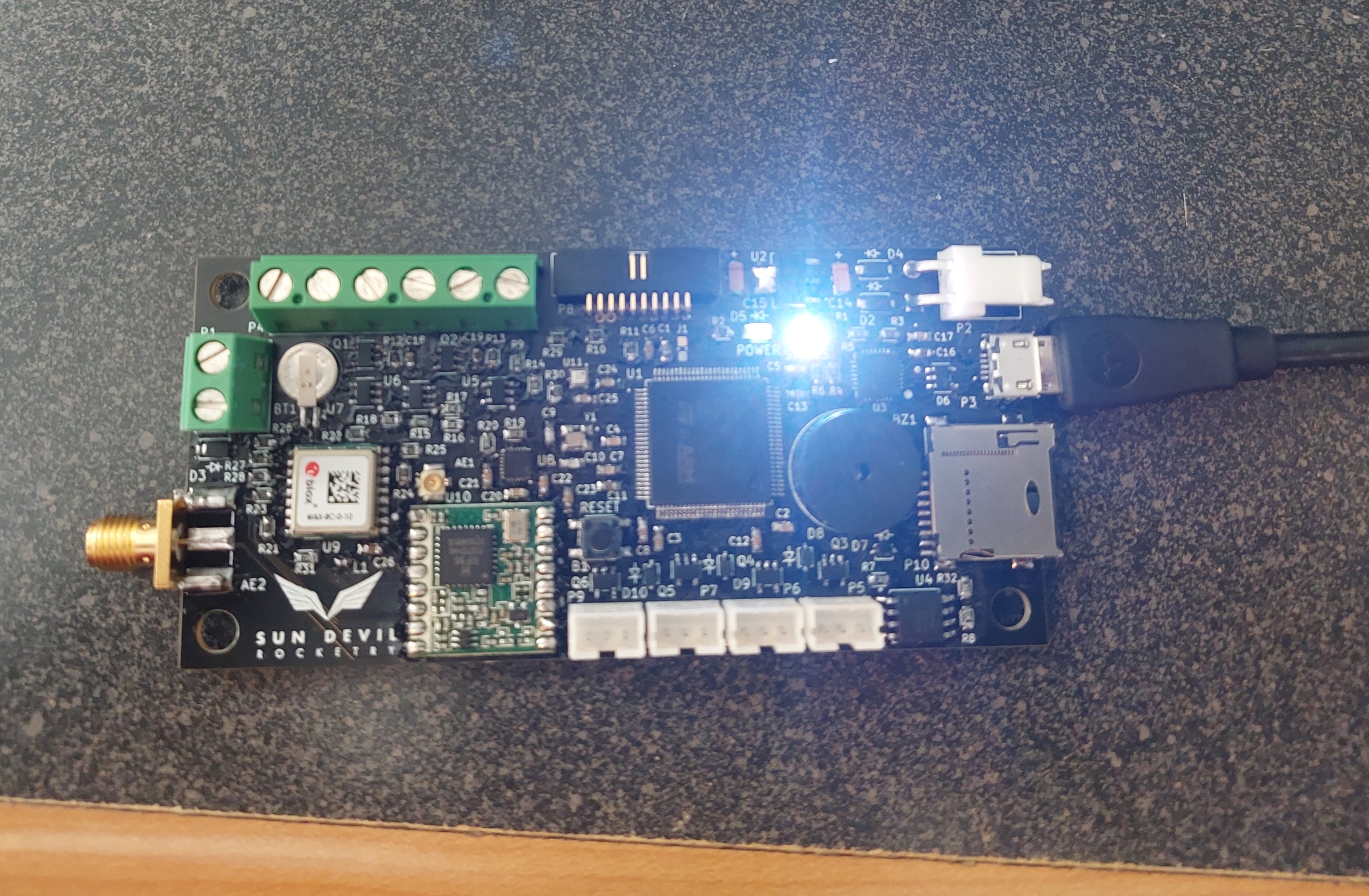
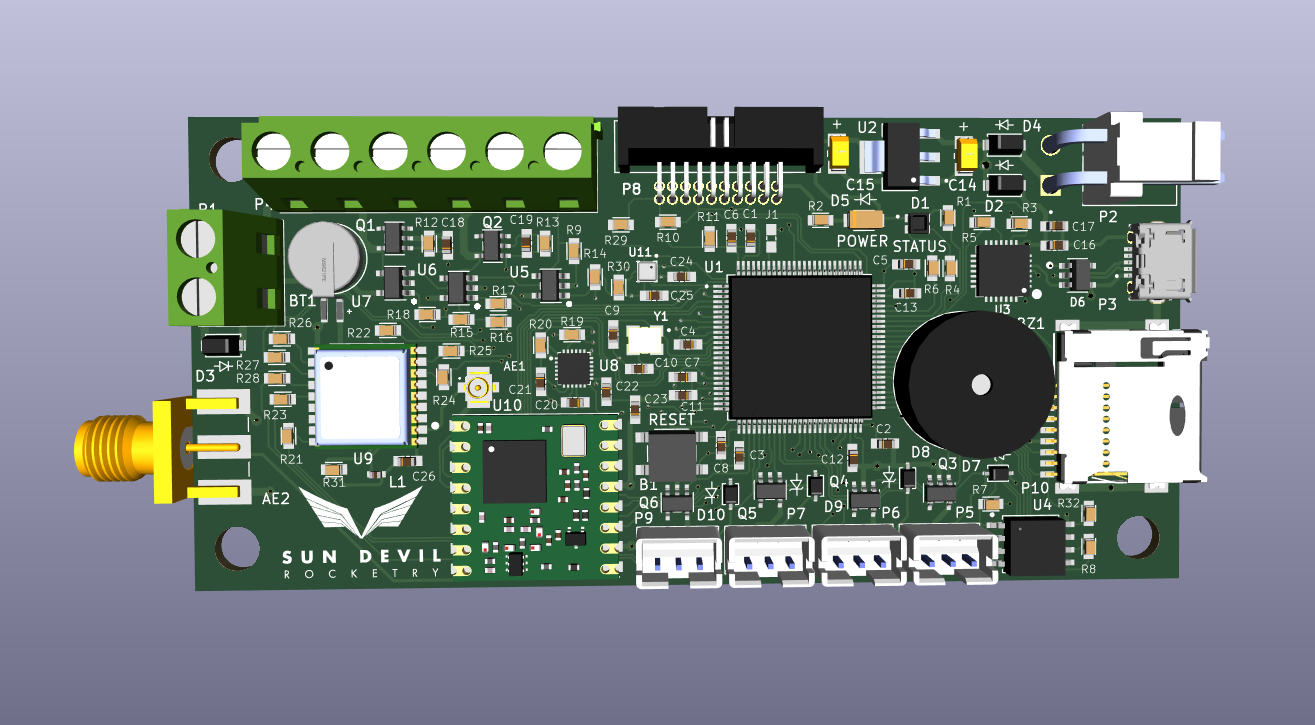
The flight computer is Sun Devil Rocketry's first ever in-house designed and manufactured high-power rocketry altimeter. The flight computer project aims to serve as a drop-in replacement for the commercially produced altimeters currently used in Sun Devil Rocketry rockets, while also supporting more advanced rocketry projects by including extra sensors and peripheral interfaces. The board supports dual-deployment parachute ejection through the use of ematch screw terminals, a barometric pressure sensor, a buzzer, an ARM Cortex-M7 microcontroller, and 4 Mb of external flash for logging flight data. The computer also includes a USB port and a micro SD card for easy access to flight data, so a separate data collection kit is not required. To support more advanced projects, the computer contains a LoRa wireless module, a GPS module, a 9-axis IMU, and four 3-connector PWM servo drivers. Design of the flight computer was optimized for a minimum form factor to allow the computer to be used in a variety of differently sized rockets.
Technical Specifications
Dimensions: 1.8"x3.8"
Microcontroller: STM32H750VBT6
Processor: ARM Cortex-M7
Maximum Clock Speed: 480 MHz
Memory: 128 kB Flash, 1MB RAM, 4 Mb External Flash, 1 SD Card
Supply Voltage: 3.6-16V
Maximum Current Draw: 1A
Sensors: Barometric Pressure Sensor, 9-axis IMU
Connectivity: USB, LoRa, GPS
Control: 4 PWM Servo-motor drivers
Sources and Documentation
Schematic: Flight-Computer-Schematic.pdf
Design Doc: Flight-Computer.pdf
PCB Design Files: GitHub
Firmware Source Code: GitHub
Bill of Materials: BOM.pdf, BOM.xlsx
3D Model: Flight-Computer.step
Media


Version History
Version 2.0
Updates:
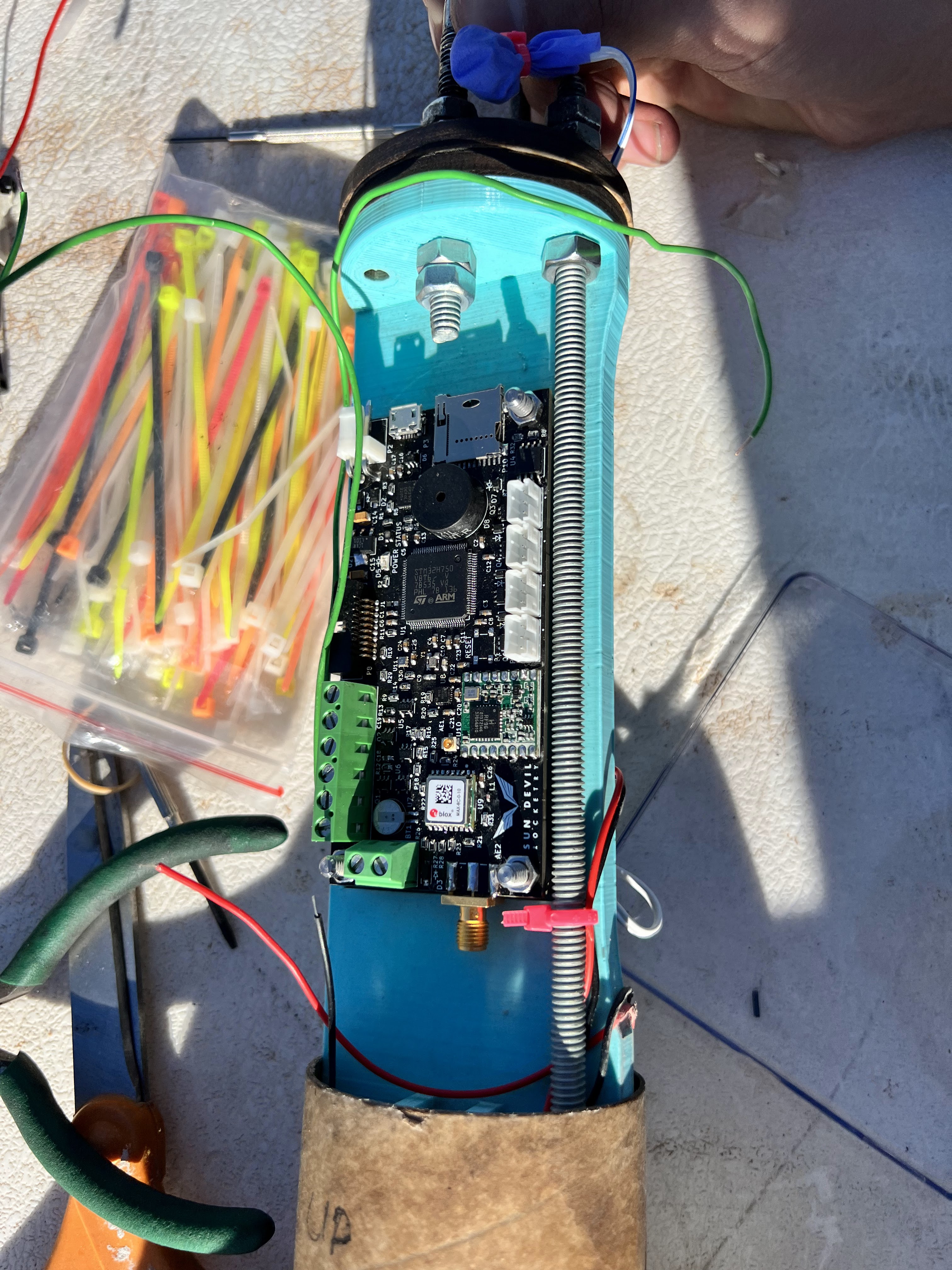
- Used both in data logging and dual-deploy flight tests
- Updated IMU from MPU-9250 to BMI323
- Added external magnetometer
- Fixed telemetry pinouts
- Added jumper to disable reset button for flight tests
- Reduced form factor of screw terminals, mounting holes, and board overall
Version 1.0
Updates:
- Used for initial data collection for event detection parameter tuning
- Initial version
- Implemented baro sensor, IMU, GPS, telemetry, and buzzer
- Reduced form factor of USB jack and SWD programmer connector